
Контрактное производство электроники под ключ в Китае
Шэньчжэнь, район Баоань, улица Фуюн, улица Фуцяо, район 3, промышленный парк Лонгхуй 6


With the large-scale improvement of the complexity and integration of system design, electronic system designers are engaged in more than 100MHZ circuit design, the bus frequency has reached or exceeded 50MHZ, some even more than 100MHZ. When the system operates at 50MHz, transmission line effects and signal integrity problems will occur. When the system clock reaches 120MHz, PCBS designed based on traditional methods will not work unless knowledge of high-speed circuit design is used. Therefore, high speed circuit design technology has become the electronic system designers must take the design means. The controllability of the design process can only be achieved by using the design techniques of high speed circuit designers.
It is generally believed that if the frequency of a digital logic circuit reaches or exceeds 45MHZ ~ 50MHZ, and the circuit working on this frequency has accounted for a certain portion of the whole electronic system (for example, 1/3), it is called a high-speed circuit. In fact, the harmonic frequency of the edge of the signal is higher than the frequency of the signal itself. It is the rising and falling edge of the signal changing rapidly (or the jump of the signal) that causes the unexpected result of the signal transmission. To achieve high frequency PCB design that meets EMC standards, the following technologies are usually required: bypass and decoupling, ground control, transmission line control, line terminal matching, etc.
(1) Bypass and decoupling
Decoupling refers to the removal of RF energy from the high-frequency device into the distribution network during device switching, while bypass transfers unwanted common-mode RF energy from the component or cable.
All capacitors are made up of LCR circuits, where L is the inductance, which is related to the length of the wire, R is the resistance in the wire, and C is the capacitance. At a certain frequency, the LC series combination will produce resonance. In the resonant state, the LCR circuit will have very small impedance and effective RF bypass. When the frequency is higher than the self-resonance of the capacitor, the capacitor gradually becomes inductive impedance, and the bypass or de-coupling effect decreases. Therefore, the effect of capacitor bypass and decoupling is affected by the length of the lead, the wiring between the capacitor and the device, and the dielectric packing. An ideal decoupling capacitor can also provide all the current required to switch the state of the logical device. It is actually the impedance between the power supply and the ground that determines how much current the capacitor can provide.
When bypass and decoupling capacitors are selected, the self-resonant frequency of the required capacitor can be calculated from the logic series and the clock speed used, and the capacitance value can be selected according to the frequency as well as the capacitive reactance in the circuit. In the selection of package scale is to try to choose a capacitor with a lower lead inductance, which is usually manifested as SMT (Surface Mount Technology) capacitors, rather than choosing through-hole capacitors (such as DiP-packaged capacitors). In addition, in product design, parallel decoupling capacitors are often used to provide a larger working band and reduce ground unbalance. In the shunt capacitor system, when the frequency is higher than the self-resonant frequency, the inductive impedance of the large capacitor increases with the increase of frequency. Small capacitors, on the other hand, exhibit capacitive impedance and decrease with increasing frequency, and the impedance of the entire capacitor circuit is smaller than that of a single capacitor.
(2) Grounding system
Most electronics require grounding. Grounding is an important method to minimize noise interference and divide circuits. Grounding is mainly performed by providing reference connections between analog and digital circuits and high frequency connections between the PCB's formation and metal casing.
PCBS often contain dangerous voltages. It is included in power supply components, communication circuits, delay drive instrumentation controls, power switching modules, and similar devices. These hazardous voltages must be removed to make the product comply with safety regulations and electromagnetic compatibility, and the usual strategy is to use ground or ground plane systems. Ground wire (or ground plane) is essentially a low impedance path of signal backflow source. Due to this effect of the ground wire, there may be a large current in the ground wire. Since the impedance of a ground wire will not be zero, this current creates a potential difference. When there is a potential difference in the ground line, the effect on the system is obvious: the potential difference can cause the circuit to misoperate, so that the system does not work properly.

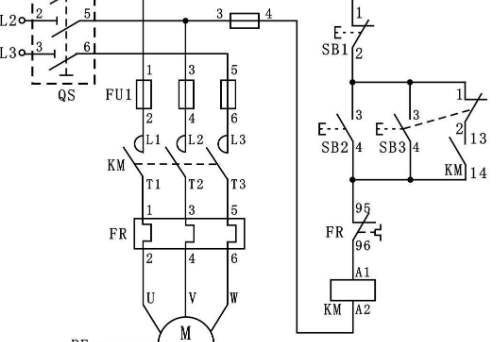
Due to the problem of ground potential difference in the grounding system, it is necessary to choose the corresponding grounding method according to the characteristics of PCB in the grounding process of the design product. Commonly used grounding methods include single point grounding, multi-point grounding, mixed grounding, etc. Single-point grounding refers to a product design in which the grounding line is connected to a single reference point. This grounding is designed to prevent the common impedance coupling caused by the current from subsystems with two different reference levels passing through the same return path as the RF current. This grounding method is suitable for low frequency PCB and can reduce the influence of distributed transmission impedance. However, in high frequency PCB, the inductance of the return path becomes the main part of the line impedance at high frequency, so in high frequency PCB, in order to minimize the ground impedance, the multipoint grounding method is usually used. One of the most important points in multipoint grounding is to require a minimum length of ground leads, because longer leads represent greater inductance, which increases ground impedance and causes ground potential differences. Hybrid grounding structure is the combination of single point grounding and multi-point grounding. This structure is often used when there is a mixture of high and low frequencies in the PCB, that is, a single point of ground at low frequency and a multi-point ground at high frequency. Figure 1 below shows capacitive coupled mixed grounding. In the corresponding inductive coupling mixed grounding model, C1 ~ C3 can be changed into suitable inductors.
(3) Transmission line effect and terminal matching
A transmission line is a transmission system suitable for effectively spreading electrical power or electrical signals between two or more terminals, such as metal conductors, waveguides, coaxial cables, and PCB wiring. If the transmission line terminals do not match, or if the signal is transmitted online over a PCB with discontinuous impedance, the circuit will experience functional problems and EMI interference, including voltage drop, shock excitation oscillation, etc. In the process of dealing with transmission line effect, the line impedance affects the final performance of the product. If and only if the circuit terminal load is equal to the characteristic impedance of the line, the signal transmitted over the PCB line will be completely absorbed at a distance enough to avoid reflection. If the terminals do not match, most of the signals will be reflected back, and it is easy to cause circuit overshoot or undershoot or even circuit oscillation.
Generally speaking, the electrical long line refers to the line length greater than 1/20 of the signal wavelength (frequency domain), or the propagation delay greater than 1/4 of the signal rising along the time (time domain). Whether the signal line is an electrical long line determines whether the circuit is lumped or distributed. In order to maintain the waveform of the distributed parameter circuit, the characteristic impedance and terminal matching of the regulating transmission line must be considered. The terminal reflected voltage of a transmission line can be expressed as follows:
Vr = Vi (rt-z0)/(Rt+Z0) = ρVi
Vr is the terminal voltage, Vi is the initial voltage, Rt is the terminal impedance, Z0 is the characteristic impedance of the line, ρ is the reflectivity. When Rt = Z0, the reflectance is 0, that is, there is no reflection and the voltage remains constant; When Rt is infinite, that is, the terminal is open, then the reflectance is 1, the voltage is 100% reflected, and then the voltage is worth twice the original voltage; If Rt = 0, that is, the terminal is short-circuited, and the reflectance is -1, then the total voltage is zero. It can be seen that the greater the mismatch, the greater the reflected voltage, and if both ends of the transmission line do not match, the circuit will oscillate.
For the transmission line effect, the special impedance is usually changed by controlling the length of the line and adjusting the width of the line to suppress the transmission line effect. For example: If CMOS or TTL circuit is used for design, the operating frequency is less than 10MHz, and the wiring length should not be greater than 7.5 inches. Operating frequency at 50MHz wiring length should not be greater than 2 inches. The wiring length shall be 1.5 inches if the operating frequency is at or above 75MHz. The maximum wiring length for GaAs chips should be 0.3 inches. If you exceed that, you have a transmission line problem. Another way to solve the transmission line effect is to choose the correct wiring path and terminal topology. The routing topology refers to the routing sequence and routing structure of network cables. When a high-speed logic device is used, the rapidly changing edge signal will be distorted by the branch route of the signal trunk unless the branch length is kept very short. In general, PCB routing adopts two basic topologies, namely Daisy Chain routing and Star distribution. When different impedances are required, the easiest method is to vary the linewidth.

Power problems in EMC design
2023-02-09
Достаточно загрузить файлы Gerber, BOM и проектные документы, и команда KINGFORD предоставит полное предложение в течение 24 часов.